Основные изменения, происходившие в приводной части станков за последний век, связаны с постепенным приближением двигателя к рабочему органу. На этом пути были массивные коробки подач с огромным количеством промежуточных элементов кинематической цепи, двух-трех ступенчатые редукторы, ременные передачи, прямые приводы через муфту. Всегда переход к следующему этапу был связан с применением последних научных разработок, получивших тем или иным способом свое приложение в станкостроении, появлением новых технологий либо удешевлением существующих. Изначально крайне дорогими являлись приводы на основе регулируемых электродвигателей и с шарико-винтовыми парами (ШВП), поэтому лишь отдельные производители находили целесообразным их использование. В наши дни уже сложно представить современный станок, который бы обошелся без ШВП или в котором величина подачи регулируется ступенчато, за счет перемещения блоков зубчатых колес.
Характерно то, что на каждом этапе никогда сразу не появлялась конструкция, оптимальная во всех отношениях. Совершенствование всегда происходило путем проб и ошибок, последовательной доработкой и устранением недостатков. В конечном итоге повсеместное распространение получали конфигурации узлов, прошедшие проверку временем, длительной эксплуатацией и доказавшие свою экономическую эффективность.

Рис. 1. ШВП
Такой вот отработанной, давно зарекомендовавшей себя, проверенной конструкцией является на данный момент привод с использованием ШВП, связанной с двигателем напрямую посредством муфты, реже ремня или зубчатой передачи. Производство всех элементов привода уже давно отработано, технологии оптимизированы, поэтому и стоимость вполне конкурентоспособна.
Тем не менее, желание конструкторов максимально сократить кинематическую цепь никуда не исчезло. Последней ступенькой, через которую надо было перешагнуть, стала шарико-винтовая пара. И сделать это позволили линейные двигатели.
Применение линейных двигателей в приводах подач современных станков является тем закономерным результатом, к которому привела их эволюция на протяжении десятков последних лет. Однако сейчас использование линейных приводов находится лишь на начальной стадии. Технология их изготовления до сих пор не до конца автоматизирована, цена высока, а применение далеко не всегда уместно. Линейный двигатель не получил своего «эталонного» воплощения (или ряда таких воплощений, испытанных временем, выбор из которых производится в зависимости от специфики использования) и существуют различные конструктивные исполнения, которые, несмотря на ряд безусловных общих преимуществ, значительно отличаются друг от друга, имея различные сильные и слабые стороны. Это тот этап, который проходит любая инновация. И все больше производителей останавливаются на линейных двигателях для приводов подач, причем как для оборудования специфического, такого, как электроэрозионные станки, так и для фрезерных и токарных станков .
Использование линейных двигателей оправдано для прецизионного оборудования и в том случае, когда большую роль играет динамическая характеристика привода: максимально допустимые ускорения, величины максимально и минимально допустимых скоростей. Тем не менее, даже на оборудование такого класса линейные привода устанавливаются, зачастую, лишь в маркетинговых целях, ведь ультрапрецизионное оборудование по умолчанию должно быть «напичкано» инновациями, позволяющими добиться высочайшей точности, недоступной конкурентам. При этом позабытыми оказываются как экономическая эффективность использования таких приводов, которая приводит к неоправданному повышению стоимости обработки, так и технологическая необходимость такого решения в целом.
В свете вышесказанного обращает на себя внимания стратегия, выбранная компанией Mitsubishi Electric . Более 40 лет назад компания представила свой первый электроэрозионный проволочно-вырезной станок, а уже в 1978 году — серийный высокоскоростной и высокоточный 4-х координатный электроэрозионный проволочно-вырезной обрабатывающий станок .

Рис. 2. Mitsubishi NA1200
Сегодня ноу-хау, накопленное за многие десятилетия в сочетании с интенсивной исследовательской работой, остаются решающим критерием при разработке новых систем электроэрозионной обработки. Являясь одним из ведущих производителей электроэрозионного оборудования и в то же время одним из крупнейших производителей линейных двигателей, японская фирма вплоть до недавнего времени не устанавливала их на свои станки. Лишь в 2009 году на станках серии NA (рис. 2) впервые были применены линейные двигатели (цилиндрические). Возникает вопрос, почему гигантская корпорация отказывается от использования в своем оборудовании своих же собственных компонентов, несмотря на то, что эти компоненты (линейные двигатели) успешно продаются по всему миру?
Стоит внимательно присмотреться к конкретным конструкциям, чтобы получить ответ на этот вопрос.
На сегодняшний день наиболее распространенными в металлообрабатывающих станках являются плоские линейные двигатели. Принципиальная схема такого двигателя приведена на рис. 3.
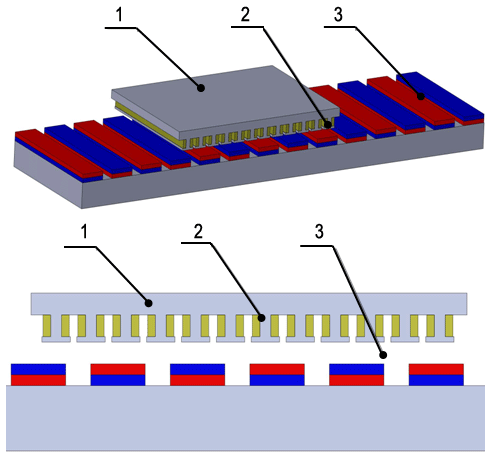
Рис. 3. Плоский линейный двигатель: принципиальная схема
Двигатель состоит из двух основных частей: ползуна, представляющего собой сердечник 1 с обмотками 2 и неподвижной частью с постоянными магнитами 3.
Как раз наличие сердечника и является основным источником характерных данному типу двигателей недостатков:

Рассмотрим теперь линейный двигатель, использованный компанией Mitsubishi Electric . В ультрапрецизионном станке Mitsubishi NA 1200 в качестве приводов по осям X, Y, U, V использованы цилиндрические линейные двигатели
Принципиальная схема цилиндрического линейного двигателя представлена на рис. 12. Особенность его конструкции заключается в том, что обмотки 2 расположены вокруг сформированных в виде цилиндра постоянных магнитов 1, а сердечника нет в принципе!
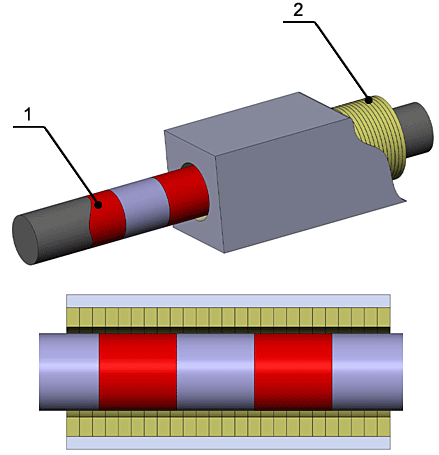
Рис. 12. Цилиндрический линейный двигатель: принципиальная схема
Цилиндрический линейный двигатель, благодаря своей конструкции, лишен всех рассмотренных выше недостатков плоского линейного двигателя. Остановимся подробнее на каждом из них.
Вернемся к вопросу, который прозвучал в начале: почему же лишь сравнительно недавно линейные двигатели появились в станках Mitsubishi? Теперь ответить на него значительно проще.

Рис. 18. Mitsubishi MV1200R
Очевидно, что специалисты компании, в угоду желанию быть на гребне волны технического прогресса, не стали отдавать предпочтение плоским линейным двигателям, которые не устраивали их в первую очередь по экономическим показателям: высокая собственная стоимость, высокая стоимость эксплуатации и ремонта, которые неминуемо переносятся на стоимость получаемой на станке детали. До тех пор, пока использование классических приводов с ШВП было оправданно экономически и при этом позволяло добиваться высочайшей точности обработки, инженеры компании лишь присматривались к тому, как покажут себя линейные двигатели применительно к электроэрозионным станкам. В результате решение нашлось. На рынке появился относительно новый тип линейных двигателей — цилиндрический линейный двигатель (ЦЛД), который обладает рядом преимуществ по сравнению с аналогами и весьма эффективен с экономической точки зрения: низкое потребление энергии, простота производства и сборки. Все те недостатки плоских линейных двигателей, рассмотренные выше, не свойственны цилиндрическим .
В 2009 году в производство была запущена серия ультрапрецизионных станков NA с ЦЛД. Эти станки великолепно зарекомендовали себя и заставили задуматься японских специалистов о модернизации и остальных станков, производимых фирмой. В марте 2012 года компания Mitsubishi Electric объявила о начале производства новой серии MV с ЦЛД и продемонстрировала эти станки на выставке «INTERMOLD 2012» в Осаке (Япония). Серия MV призвана заменить прекрасно себя зарекомендовавшие серии FA и BA. Притом, что новые станки обладают великолепными технологическими возможностями и превосходной точностью, главное их преимущество — в экономичности и чрезвычайно низких текущих издержках. Во многом благодаря использованию ЦЛД, станки серии MV потребляют на 69% меньше энергии, чем их предшественники и на 42% позволяют снизить стоимость обработки при 30% сокращении времени! Это действительно потрясающий результат, который позволяет утверждать, что ЦЛД будут и дальше успешно использоваться в станках компании Mitsubishi Electric.
Применение ЦЛД потребовало разработки и применения самой передовой технологии управления с использованием сверхскоростной оптоволоконной связи и системной коммуникацией в режиме реального времени. Безусловно, нас ждет дальнейшее совершенствование конструкции и системы управления, но уже сейчас можно достаточно уверенно утверждать, что применение ЦЛД в электроэрозионных станках — это инновационное решение, которое ознаменовало собой новый этап эволюции в станкостроении.
К настоящему моменту можно выделить несколько типов линейных непосредственных двигателей (далее будем называть их просто линейными двигателями): асинхронный, постоянного тока, синхронный на постоянных магнитах (вентильный), шаговый.
Еще в начале ХХ века (02.06.1906 №12581) в Англии Зеденом был зарегистрирован патент на изобретение линейного асинхронного двигателя. Приведем выдержку из этого патента.
"Изобретение относится к устройствам для приведения в движение железнодорожных экипажей, лифтов, возвратно-поступательных частей машин, станков и других приспособлений посредством движущегося (бегущего) магнитного поля. В применении к железным дорогам магнит (индуктор), возбуждаемый трехфазным или иным током, устанавливается на экипаже вблизи от рельса (полосы), который играет роль короткозамкнутого якоря многофазного двигателя. Полоса может быть выполнена из стали и латуни или другого металла, и в ней для экономии массы и регулирования тока проделаны отверстия (перфорации) различной ширины - для обеспечения пуска экипажа и т. п. Магниты (индукторы) могут быть установлены над или под полосой для увеличения сцепления или частичной компенсации массы экипажа. Они могут быть расположены с противоположных сторон полосы, либо электромагнит (индуктор) может быть расположен с одной стороны полосы, а шихтованный пакет стали - с другой. Устройство может быть таким, что силы уравновешиваются или не уравновешиваются. В случае лифта, например, индукторы направлены наружу для взаимодействия с двумя направляющими полосами".
Характерно, что практически все конструкции современных линейных асинхронных двигателей в той или иной мере используют положения этого патента, исключения составляют лишь несколько специальных типов двигателей.
Одним из первых линейных асинхронных электроприводов со значительным поступательным перемещением и большой, хотя и кратковременно реализуемой мощностью следует считать систем разгона самолетов, разработанную в 1945 г. фирмой "Вестингауз" для флота США. Первичная часть двигателя укреплялась на тележке, на которой устанавливался разгоняемый самолет. К тележке подводилось трехфазное питание с одной заземленной фазой. Неподвижная вторичная часть имела в длину несколько сотен метров и представляла собой набранный из стальных пластин магнитопровод с короткозамкнутой клеткой из медного сплава (большим сопротивлением по краям пути и меньшим в середине пути). Двигатель развивал силу тяги 75 кН при скоростях от 0 до 100 м/с, то есть имел мощность порядка 7500 кВт. Реактивный самолет массой 4,5.103 кг разгонялся на полосе длиной 165 за 4,2 с до скорости 50 м/с (а=12 м/с2, F=ma=55 кН, остальные 20 кН тратились на преодоление сопротивления воздуха и для подъема).
Огромное число разработок проводилось и проводится до сих пор в плане использования линейных асинхронных двигателей в качестве приводящих устройств транспортных средств. Причем, разработки велись как по пути развертывания двигателей вращательного движения в плоскость, так и совершенно автономно (это касается не только асинхронных двигателей).
Линейные асинхронные двигатели имеют ряд преимуществ и недостатков, обуславливающих их область применения. К преимуществам можно отнести невысокую стоимость комплектующих, отсутствие необходимости наличия датчика для движения, достижимость высоких значений скоростей и ускорений. К недостаткам: необходимость небольшого воздушного зазора, низкий КПД (невозможность работы из-за значительных потерь во вторичной части на низких скоростях и в режиме поддержания силы). Отсюда и область его применений - транспортные задачи, требующие больших скоростей и ускорений, плавности хода, но не требующие высокой точности.
С развитием технологии изготовления постоянных магнитов, а в частности с появлением таких сплавов, как сомарий-кобальт и неодим-железо-бор, получили развитие и электрические машины с постоянными магнитами. Вентильные электроприводы с двигателями с возбуждением от постоянных магнитов являются на сегодняшний день наиболее эффективными и наиболее динамичными. В настоящий момент можем наблюдать бурное развитие систем с непосредственным приводом на основе вентильных двигателей. Это касается и двигателей вращательного движения, и линейных двигателей. Линейные вентильные двигатели непосредственного привода призваны заменить всевозможные передаточные устройства в системах автоматической обработки и точного позиционирования.
Сейчас можно выделить два основных принципиально различных типа линейных вентильных двигателей: линейный вентильный двигатель с ферромагнитным якорем и линейный вентильный двигатель с немагнитным якорем. Причем, не имеет значения якорь или индуктор движется, хотя предпочтительным в настоящее время является передвижение обмоток (якоря), нежели магнитов (индуктора).
Линейные двигатели с ферромагнитным якорем получили значительное развитие и сейчас компании производители таких двигателей могут предложит машины с тяговыми усилиями от 200 Н до 20 кН, что перекрывает значительный диапазон задач даже тяжелого станкостроения. Область применения этих двигателей постепенно расширяется и включает уже любое станочное оборудование, требующее быстрых и стабильно точных перемещений, например установки для лазерной резки и многофункциональные станки, в частности, для твердого точения и шлифования. В таких станках, выпускаемых в мире несколькими фирмами, при точении используют высокую динамику линейных двигателей, а при шлифовании - обеспечиваемую ими высокую точность перемещений. Отсутствие износа и возможность выполнения этими двигателями частых быстрых и коротких ходов особенно востребованы в шлифовальных станках, поскольку шарико-винтовые передачи нередко не выдерживают такого темпа и выходят из строя.
На рис.1 приведен такой двигатель. Индуктор выполнен в виде разомкнутой полосы постоянных магнитов. Якорь выполнен в едином корпусе и состоит из многофазной системы обмоток и ферромагнитной пластины, замыкающей поток индуктора. Якорь закреплен на транспортной пластине, которая может совершать возвратно-поступательные движения по линейным направляющим качения. На рис.1 не виден датчик перемещения, который установлен также на исполнительном органе. Через гибкий кабель-канал к якорю и к датчику подведены кабели соответственно питания обмоток и обратной связи (сигналов датчика линейного перемещения).
Рис. 1 Линейный двигатель с ферромагнитным якорем
Такая конструкция линейного вентильного двигателя явилась следствием прямого развертывания синхронной машины вращательного движения с постоянными магнитами в плоскость. Хотя эти двигатели являются на сегодняшний день основными конкурентами шарико-винтовых передач, тем не менее в связи с присутствием в них некоторых особенностей (а именно наличие потерь "в стали" якоря и наличие значительного притяжения исполнительного органа к индуктору), развитием таких направлений как лазерная и термическая обработка явили миру принципиально новую конструкцию линейных вентильных двигателей. Именно требования сокращения потерь в преобразовании энергии и увеличения номинальных скоростей и ускорений привели к появлению и активной разработке линейных вентильных двигателей с немагнитным якорем.
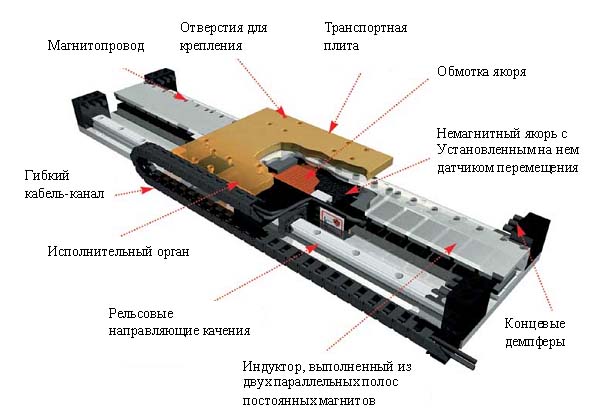
Рис. 2. Линейный вентильный двигатель с немагнитным якорем.
На рис.2 представлен пример такого двигателя (Trilogy systems, США). В отличии от предыдущего двигателя, якорь двигателя с немагнитным якорем не содержит магнитопровдящих частей (из-за этого он так и назван) и выполнен в виде системы многофазных обмоток. Индуктор выполнен в виде двух стальных пластин, с установленными на них постоянными магнитами и скрепленными в единый блок, который в сечении напоминает букву U. Поэтому в англоязычных источниках можем встретить другое название таких двигателей - U-образные линейные двигатели.
Представление об устройстве линейного асинхронного двигателя можно получить, если мысленно разрезать статор и ротор с обмотками обычного асинхронного двигателя вдоль оси по образующей и развернуть в плоскость. Образовавшаяся плоская конструкция представляет собой принципиальную схему линейного двигателя. Если теперь обмотки статора такого двигателя подключить к сети трехфазного переменного тока , то образуется магнитное поле , ось которого будет перемещаться вдоль воздушного зазора со скоростью V, пропорциональной частоте питающего напряжения f и длине полюсного деления t: V = 2пf . Это перемещающееся вдоль зазора магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС , под действием которой по обмотке начнут протекать токи. Взаимодействие токов с магнитным полем приведет к появлению силы, действующей, по правилу Ленца , в направлении перемещения магнитного поля. Ротор - в дальнейшем будем называть его уже вторичным элементом - под действием этой силы начнет двигаться. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (V - v)/V, где v - скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%. Вторичный элемент линейного двигателя не всегда снабжается обмоткой. Одно из достоинств линейного асинхронного двигателя заключается в том, что в качестве вторичного элемента может использоваться обычный металлический лист. Вторичный элемент при этом может располагаться также между двумя статорами, или между статором и ферромагнитным сердечником. Вторичный элемент выполняется из меди, алюминия или стали, причем использование немагнитного вторичного элемента предполагает применение конструктивных схем с замыканием магнитного потока через ферромагнитные элементы. Принцип действия линейных двигателей со вторичным элементом в виде полосы повторяет работу обычного асинхронного двигателя с массивным ферромагнитным или полым немагнитным ротором. Обмотки статора линейных двигателей имеют те же схемы соединения, что и обычные асинхронные двигатели, и подключаются обычно к сети трехфазного переменного тока. Линейные двигатели очень часто работают в так называемом обращенном режиме движения, когда вторичный элемент неподвижен, а передвигается статор. Такой линейный двигатель, получивший название двигателя с подвижным статором, находит, в частности, широкое применение на электрическом транспорте. Например, статор неподвижно закреплен под полом вагона, а вторичный элемент представляет собой металлическую полосу между рельс, а иногда вторичным элементом служат сами рельсы. Одной из разновидностей линейных асинхронных двигателей являются трубчатый (коаксиальный) двигатель. Статор такого двигателя имеет вид трубы, внутри которой располагаются перемежающиеся между собой плоские дисковые катушки (обмотки статора) и металлические шайбы, являющиеся частью магнитопровода . Катушки двигателя соединяются группами и образуют обмотки отдельных фаз двигателя. Внутри статора помещается вторичный элемент также трубчатой формы, выполненный из ферромагнитного материала. При подключении к сети обмоток статора вдоль его внутренней поверхности образуется бегущее магнитное поле, которое индуцирует в теле вторичного элемента токи, направленные по его окружности. Взаимодействие этих токов с магнитным полем двигателя создает на вторичном элементе силу, действующую вдоль трубы, которая и вызывает (при закрепленном статоре) движение вторичного элемента в этом направлении. Трубчатая конструкция линейных двигателей характеризуется аксиальным направлением магнитного потока во вторичном элементе в отличие от плоского линейного двигателя, в котором магнитный поток имеет радиальное направление.
Католицкий Никита Александрович
студент Электроэнергетического факультета Ставропольский государственный аграрный университет г. Ставрополь, Россия
Аннотация: В статье описано устройство, виды линейных двигателей их отличия от других видов электродвигателей, подробно описано применение, достоинства и недостатки. Цель статьи заключается в описании преимущества линейных двигателей над другими.
Ключевые слова: Линейный электродвигатель, ротор, статор, привод, якорь, магнитопровод
Linear electric motor
Katolickij Nikita Aleksandrovich
student Electricity Department Stavropol State Agrarian University Stavropol, Russia
Abstract: In article the device, types of linear engines of their difference from other types of electric motors is described, application, merits and demerits is in detail described. The purpose of article consists in the description of advantage of linear engines over others.
Keywords: linear electric motor, rotor, stator, drive, anchor, magnetic conductor
На протяжении многих лет промышленность зависит от различных ременных и винтовых передач, а также пневматических механизмов необходимых для выполнения линейного позиционирования. Спрос на высокоскоростную пропускную способность, многочисленные рабочие циклы, гибкую настройку и программирование позволил определить недостатки в этих устройствах. Часто при выполнении точного контролируемого позиционирования в поступательном движении приходится идти на компромисс.
Благодаря технологии непосредственного привода линейного двигателя достигается высокое качество решения задач линейного позиционирования. Эта технология подразумевает непосредственное использование силы электромагнитного взаимодействия без использования ремня, шариковинтовой передачи либо промежуточного звена другого вида. Линейный привод обеспечивает непосредственное линейное перемещение (преобразование вращательного движения в поступательное не происходит).
Рисунок 1 – Устройство линейного двигателя
Электрический линейный двигатель является механизмом, в котором подвижная часть не находится во вращении (в традиционных вариантах двигателей подвижная часть вращается), а линейно перемещается вдоль неподвижной части агрегата, представленной в виде незамкнутого магнитопровода, длина которого имеет произвольное значение. Внутри магнитопровода создается бегущее магнитное поле. В стандартных электрических двигателях ротатор и статор свернуты в виде колец, а в линейном двигателе эти элементы растянуты в полосы. Благодаря тому, что обмотка статора включается поочередно, создается бегущее магнитное поле. В состав линейного электрического двигателя постоянного тока входит якорь с расположенной на его поверхности обмоткой, являющейся коллектором (направляющим элементом) и разомкнутый магнитопровод с обмотками возбуждения (подвижной частью), распложенными в таком порядке, что векторы сил, появляющихся в полюсах магнитопровода, имеют одно направление. Простота регуляции скорости перемещения подвижной части – отличительная черта линейного электродвигателя. Агрегаты переменного тока могут быть синхронного и асинхронного типа. Якорь в асинхронном линейном электродвигателе выполняется в виде бруска, чаще всего прямоугольного сечения, на котором отсутствует обмотка. Монтаж якоря выполняется вдоль пути перемещения подвижной части агрегата, оснащенной магнитопроводом с развернутыми многофазными обмотками, которые питаются от источника переменного тока. В результате взаимодействия магнитного поля магнитопровода подвижной части и поля якоря появляются силы, заставляющие подвижную часть перемещаться быстрее, относительно неподвижного якоря. Процесс происходит до момента уравнения скорости перемещения подвижной части и бегущего магнитного поля.
Чаще всего такие агрегаты используются в сфере электрического транспорта. Этому способствуют особые преимущества двигателей такого образца:
Прямолинейное движение статора отлично подходит для многих средств передвижения;
Простая конструкция, в которой отсутствуют трущиеся элементы, то есть энергетический поток внутри магнитного поля непосредственно преобразовывается в механическую энергию. Благодаря этому достигаются высокие показатели КПД и надежности агрегата;
Независимость силы тяги от сцепления колесных пар с рельсовыми путями. Это свойство недостижимо для стандартных агрегатов электрической тяги;
Отсутствие вероятности буксирования колес электрического транспорта, что стало причиной для выбора линейного двигателя;
Ускорение и скорость движения транспорта могут иметь любые значения, ограниченные комфортабельностью передвижения, допустимой скоростью качения колес по рельсовым путям и дорогам, а также степенью динамической устойчивости ходовой части транспортного средства и пути.
Линейные двигатели асинхронного типа необходимы для привода механизмов транспортировки различной продукции. Эти конвейеры оснащают металлическими лентами, проходящими внутри статоров линейных двигательных систем, выполняющими функцию вторичного элемента. Благодаря использованию линейной двигательной системы снижается степень предварительного натяжения ленты, устраняется вероятность ее проскальзывания, а также повышаются показатели скорости и надежности работы конвейера.
Линейные двигатели используют для машин ударного действия, к примеру, молоты для забивания свай, необходимые в сфере дорожных работ и строительстве. Статор линейной двигательной системы размещают на стреле молота, а его перемещение по направляющим элементам стрелы в вертикальном направлении обеспечивается благодаря лебедке. Ударная часть молота выполняет функцию вторичного элемента двигательной системы. Для осуществления подъема ударной части молота включение двигателя происходит так, что бегущее поле направляется вверх. При достижении ударным элементом крайнего верхнего положения происходит деактивация двигателя и происходит перемещение ударного элемента вниз на поверхность сваи под воздействием силы тяжести. Иногда деактивация двигателя не происходит – двигательная система работает в реверсивном режиме, увеличивая силу удара. В соответствии со степенью углубления сваи статор двигательной системы перемещается вниз благодаря лебедке. Конструкция электрического молота довольно проста. Его изготовить довольно просто. Повышенная точность в ходе производства его элементов не требуется, а его конструкция не чувствительна к изменениям температурных показателей, потому устройство может моментально приступить к выполнению своих функций.
Одним из видов линейных двигательных систем считаются магнитогидродинамические насосы. Эти устройства используют для перекачивания электропроводных жидкостей. Такие насосы широко используются: в металлургии для выполнения транспортировки, дозировки, а также перемещения металла в жидком виде и на АЭС для выполнения перекачки жидкометаллических теплоносителей.
Магнитогидродинамические насосы бывают двух видов: постоянного и переменного тока. В первом случае в роли первичного элемента (статора) выступает С-образный электромагнит. В воздушный зазор электрического магнита монтируют трубопровод с жидким металлом. Благодаря электродам, приваренным к стенкам трубопровода, пропускается постоянный ток от внешнего источника. В большинстве случаев обмотка возбуждения входит в последовательную цепь электродов. При возбуждении электрического магнита на металл, расположенный на участках, по которым проходит постоянный ток, оказывается воздействие электромагнитной силы, такой же, как сила, действующая на проводник с током, расположенным в зоне магнитного поля. В результате воздействия этой силы происходит перемещение металла по трубопроводу. Ключевые отличия МГД насосов заключаются в отсутствии движущихся механических элементов, а также в возможности герметизации канала транспортировки металла.
К преимуществам линейных двигательных систем стоит отнести отсутствие вращающихся элементов. К недостаткам стоит отнести низкие энергетические показатели, сравнительно со стандартными моделями электрических приводов, что объясняется разомкнутой электромагнитной цепью и существенными рабочими зазорами. Кроме того недостатками является сложность и высокая цена производства. Линейные двигательные системы используют для поездов, высокоскоростного наземного транспорта, относящегося к группе левитирующих транспортных средств. Общие показатели КПД стандартного агрегата и линейного электрического двигателя, в случае его оптимизации, практически равны, в случаях, когда исключаются промежуточные звенья передачи силы тяги. Со временем линейные электродвигатели вытеснят традиционные приводы с редукторами.
Список литературы:
- Гринченко В. А. Обоснование базовой конструкции линейного электродвигателя // Theoretical & Applied Science. - 2013. - Т. 1. - №11 (7). - С. 58-60.
- Гринченко В. А., Мишуков С. В. Расчет статической силы тяги линейного электродвигателя новой конструкции // Новые задачи технических наук и пути их решения. - Уфа: Аэтерна, 2014. - С. 18-20.
- Никитенко Г. В., Гринченко В. А. Линейный двигатель возвратно-поступательного движения с регулированием амплитуды колебаний якоря // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2009. - С. 407-410.
- Никитенко Г. В., Гринченко В. А. Результаты исследования линейного двигателя для вакуумного пульсатора доильного аппарата // Методы и технические средства повышения эффективности использования электрооборудования в промышленности и сельском хозяйстве. - Ставрополь: Агрус, 2010. - С. 268-272.
- Пат. 2357143 Российская Федерация, МПК8 F 16 К 31/06. Электромагнитный клапан / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2007141983/06; заявл. 12.11.07; опубл. 27.05.09.
- Пат. 2370874 Российская Федерация, МПК8 H 02 K 33/12. Линейный двигатель / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008112342/09; заявл. 31.03.08; опубл. 20.10.09.
- Пат. 82990 Российская Федерация, МПК8 А 01 J 7/00. Регулятор вакуума / Никитенко Г. В., Гринченко В. А.; заявитель и патентообладатель Ставроп. гос. аграр. ун-т. - № 2008150545/22; заявл. 19.12.08; опубл. 20.05.09.
Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Преобразование вращательного движения в поступательное осуществляется посредством специальных кинематических звеньев: винт-гайка, шарико-винтовая передача, шестерня-зубчатая рейка, кривошипно-шатунная передача и другие.
Естественным для конструкторов рабочих машин является желание использовать для привода рабочих органов, совершающих поступательное и возвратно-поступательное движение, двигателей, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, использующие линейные асинхронные, вентильные и . Принципиально линейный двигатель любого типа может быть образован из двигателя вращательного движения путем линейной развертки цилиндрического статора в плоскость.
Представление об устройстве линейного асинхронного двигателя можно получить, если развернуть статор асинхронного двигателя в плоскость. При этом вектор намагничивающих сил статора будет линейно перемещаться вдоль развертки статора, т.е. при этом образуется не вращающееся (как в обычных двигателях), а бегущее электромагнитное поле статора.
В качестве вторичного элемента может использоваться ферромагнитная полоса, располагаемая с небольшим воздушным зазором вдоль развертки статора. Эта полоса играет роль короткозамкнутого ротора. Вторичный элемент увлекается движущимся полем статора и линейно перемещается со скоростью, меньшей скорости движения поля статора на величину линейного абсолютного скольжения.
Линейная скорость бегущего электромагнитного поля будет
![]()
где τ, м - полюсное деление - расстояние между соседними полюсами линейного асинхронного двигателя.
Скорость вторичного элемента
![]()
где sЛ - относительное линейное скольжение.
При питании двигателя напряжением стандартной частоты получаемые скорости поля будут достаточно велики (более 3 м/с), что затрудняет использование этих двигателей для привода промышленных механизмов. Такие двигатели применяются для высокоскоростных транспортных механизмов. Для получения более низких скоростей движения и регулирования скорости линейного асинхронного двигателя его обмотки питают от преобразователя частоты.
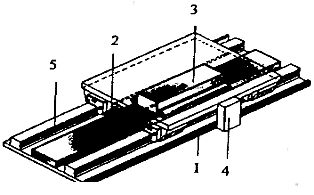
Рис. 1. Конструкция линейного однокоординатного двигателя.
Применяются несколько вариантов конструкций линейного асинхронного двигателя. Одна из них показана на рис. 1. Здесь вторичный элемент (2) - полоса, соединенный с рабочим органом, перемещается по направляющим 1 под действием бегущего электромагнитного поля, создаваемого статором 3. Такая конструкция удобна для компоновки с рабочей машинной, однако, она сопряжена со значительными потоками рассеяния поля статора, вследствие чего cosφ двигателя будет низким.
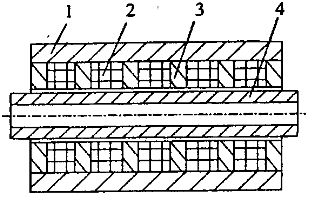
Рис.2. Линейный двигатель цилиндрической конструкции
Для увеличения электромагнитной связи между статором и вторичным элементом, последний размещают в прорезь между двумя статорами, либо конструкция двигателя выполняется в виде цилиндра (см. рис. 2). В этом случае статор двигателя представляет собой трубку (1), внутри которой расположены цилиндрические наборные катушки (2), являющиеся обмоткой статора. Между катушками размещены ферромагнитные шайбы 3, являющиеся частью магнитопровода. Вторичный элемент - шток трубчатой формы также выполнен из ферромагнитного материала.
Линейные асинхронные двигатели могут также иметь обращенную конструкцию, когда вторичный элемент неподвижен, а перемещается статор. Такие двигатели обычно применяются на транспортных средствах. В этом случае в качестве вторичного элемента используется рельс или специальная полоса, а статор размещается на подвижной тележке.
Недостатком линейных асинхронных двигателей является низкий к.п.д и связанные с этим потери энергии, прежде всего, во вторичном элементе (потери скольжения).
В последнее время кроме асинхронных начали применяться . Конструкция линейного двигателя такого типа аналогична представленной на рис. 1. Статор двигателя развернут в плоскость, а на вторичном элементе размещаются постоянные магниты. Возможен вариант обращенной конструкции, когда статор является подвижной частью, а вторичный элемент с постоянными магнитами неподвижен. Переключение обмоток статора производится в зависимости от относительного положения магнитов. С этой целью в конструкции предусмотрен датчик положения (4 - на рис. 1).
Для позиционных приводов эффективно применяются также линейные шаговые двигатели. Если развернуть в плоскость статор шагового двигателя, а вторичный элемент выполнить в виде пластины, на которой путем фрезерования канавок образованы зубцы, то при соответствующем переключении обмоток статора вторичный элемент будет совершать дискретное движение, шаг которого может быть весьма малым - до долей миллиметра. Часто применяется обращенная конструкция, в которой вторичный элемент неподвижен.
Скорость линейного шагового двигателя определяется величиной зубцового деления τ, числом фаз m и частотой переключения
Получение высоких скоростей движения не вызывает трудностей, поскольку увеличение зубцового деления и частоты не лимитируется технологическими факторами. Ограничения существуют для минимального значения τ, т.к. отношение зубцового деления к величине зазора между статором и вторичным элементом должно быть не меньше 10.

Использование дискретного привода позволяет не только упростить конструкцию механизмов, совершающих линейное однокоординатное движение, но и дает возможность с помощью одного привода получить двух или многокоординатное движение. Если на статоре подвижной части расположить ортогонально две системы обмоток, а во вторичном элементе выполнить канавки в двух перпендикулярных направлениях, то подвижный элемент будет совершать дискретное движение в двух координатах, т.е. обеспечивать перемещение на плоскости.
В этом случае возникает задача создания опоры для подвижного элемента. Для ее решения может использоваться воздушная подушка - напор воздуха, подаваемого в пространстве под подвижным элементам. Линейные шаговые двигатели развивают относительно низкое тяговое усилие и имеют низкий к.п.д. Основной областью их применения являются легкие манипуляторы, легкие сборочные станки, измерительные машины, станки для лазерной резки и другие устройства.


